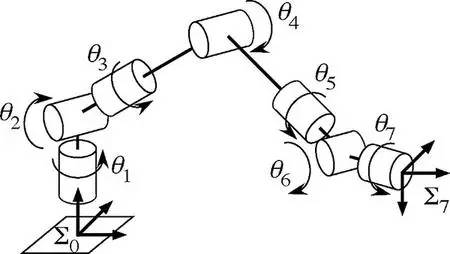
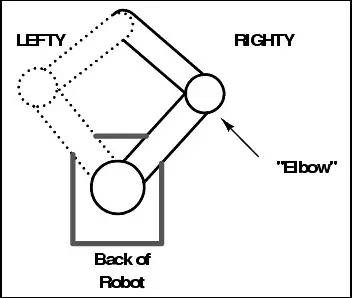
The most used industrial robots are generally six-axis, but the recently launched human-machine cooperation robotic arm has seven degrees of freedom and has been wondering why. Until recently, I saw a question that was known: How many degrees of freedom does the human arm (wrist to shoulder) have? It was discovered that the original 7 degrees of freedom were a true restoration of the human arm. How many degrees of freedom does the human arm (wrist to shoulder) have? I don't think most people have thought about it, let alone knowing which degrees of freedom there are, even those who are studying engineering, may not be able to explain clearly. I didn’t expect to know that some people have answered this question with such professionalism and connotation. At the same time, they are so philosophical and can’t help but want to share this answer. 7 degrees of freedom. Someone asked if 5 and 6 are the same. 5 is the only joint to be rotated when the key is turned, the power is from the twist of the two shins of the arm; 6 is the only joint to be rotated when the mouse is placed on the table, and the power is from the rotation of the wrist. As for why the human arm is 7 degrees of freedom, not 8 or 6, it may be because God knows robot control very well. Let's briefly introduce it below. First, a theorem is introduced: a 6-degree-of-freedom manipulator cannot change from one configuration to another while maintaining the three-dimensional position of the end mechanism in space. This theorem is very difficult to understand at first glance, consider a simpler case: In this picture, the arm of a robot consists of a base, two joints, and two connectors (imagine opening a compass and pinching one end with your fingers). Can we turn the robot from the "lefty" state to the "righty" state while keeping the position of the upper end mechanism on the plane unchanged? The answer is no, no matter how you move the two joints, the position of the end mechanism must be changed during the movement. The officer can also take two pens and try to move on the table. Similarly, a 6-DOF robot, even if the three-dimensional position of the end mechanism corresponding to a certain two-group configuration is the same, the robot cannot keep the end mechanism motionless when moving from one configuration to another. If someone has seen industrial robot welding on TV, they will find that when it is soldering in the same position, it will be twisted to the whole side for a while, and then it will be twisted to the other side, which looks very cool. In fact, this is only because, although the welding just wants to change the orientation of the end mechanism without changing the position of the end mechanism, due to the limitation of the theorem, it must be moved back and then twisted to ensure the movement of the end mechanism. Nothing will be hit during the orientation, because the three-dimensional position of the end mechanism will be turbulent when moving. If it can turn around a little, it can achieve its purpose, and it will cost the whole coolness to turn up and dry up... and after a degree of freedom, it will be different. Think about the action of turning the key when opening the door. In this case, the three-dimensional position of the end mechanism (hand) of the human arm has not changed (always in front of the keyhole), but the three-dimensional rotation of the end mechanism (hand) has changed (turning the key) . People can achieve this simple action because our arms have 7 degrees of freedom. Having said that, the officer may see it, I understand, my end mechanism has 6 degrees of freedom (three-dimensional position, three-dimensional rotation), and the arm as a robot has 7 degrees of freedom, these two freedoms. It seems that it is not the same thing, but the number is 7-6=1, so I can use this one degree of freedom to turn the key. If God designed our arms to six degrees of freedom, the action of turning the keys must be very exaggerated. You can not change your wrist and feel it when you turn the key. So why not give us more freedom? Because the more degrees of freedom, the less rigid the robot. If our arm has 8 degrees of freedom, then the probability of injury will be much more. Although there is no biological research to prove this (there are no 8 degrees of freedom in the world), robotic research can prove this problem. So 7 is the best choice. I don't know if the 7 is the best and most sacred number in the Bible, seven days a week, and whether there are seven joints in the human arm. This answer is not professional and connotation, but also so easy to understand, I want to tell the gods, please accept my knees. . . . Camera Filter,Camera Polarizer Lens,Camera Raw Filter,Lens Filter Shaoxing Shangyu Kenuo Photographic Equipment Factory , https://www.kernelphoto.com
The answer to this question is to know the netizen Yang Shuo, the answer is as follows: To be honest, I am quite familiar with robot manipulation, but the answers upstairs do not understand at first glance. It is not black, but it is not easy for non-professionals to understand. I will try to explain it in plain language. First of all, the answer to the question is: Just count it!